IAF Mehar Baba Prize Competition
Swarm drones for long-range, BVLOS search and rescue missions.
The Mehar Baba Prize Competition was a high-stakes initiative by the Indian Air Force (IAF) to identify and nurture the development of indigenous swarm drone capabilities for Humanitarian Aid and Disaster Relief (HADR) operations.
As the Team Lead of UAS DTU (a team of 65 researchers at the time), I led the development of a heterogeneous swarm of 25 Unmanned Aerial Vehicles (UAVs) capable of autonomous operations over a range of 50 km. We were one of only five teams selected for the final phase from across India. You can watch the official IAF project video here.

Mission Profile
- Long-Range Endurance: Design UAVs capable of traveling up to 50 km to a target search area, completing the mission, and returning.
- Complex Navigation: Navigate a swarm of at least 25 UAVs to a search area located ~50 km from the takeoff location, handling both GPS-enabled and GPS-denied environments.
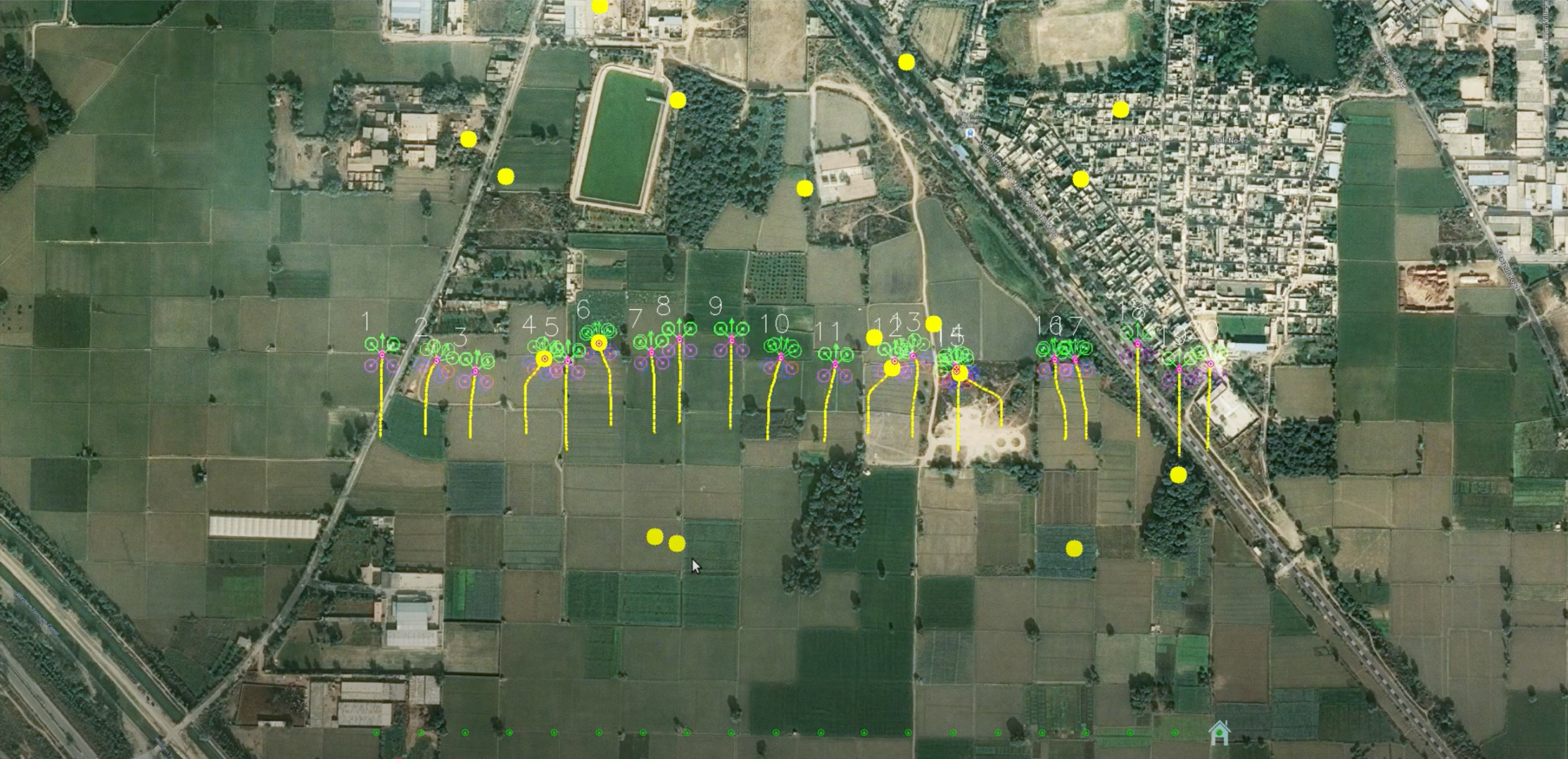
- Efficient Search: Develop an area search algorithm that detects human survivors significantly faster than standard grid search methods.
- Payload Delivery: Detect human survivors and safely drop relief material payloads to their specific locations.
- Night Operations: Ensure the swarm is fully capable of performing operations in low-light and night conditions.
Key Achievements
- Scale: Scaled operations from a single unit to a synchronized swarm of 25 UAVs.
- Funding: Secured INR 7.5 Crores ($1 Million) via a comprehensive MoU with Adani Defence and Aerospace and built the complete system within this constrained budget.
- Impact: Demonstrated a working solution to the Indian Air Force, successfully completing the mission profile.
- Innovation: Developed a custom navigation controller for the UAV swarm (Gupta et al., 2020) and an optimized target-search algorithm (Gupta et al., 2021).
Personal Contribution
My primary technical contribution focused on the intersection of multi-agent systems, control dynamics, and path planning. None of this would have been possible without my wonderful teammates, so a special thanks to Team UAS-DTU.
1. Swarm Navigation & Control
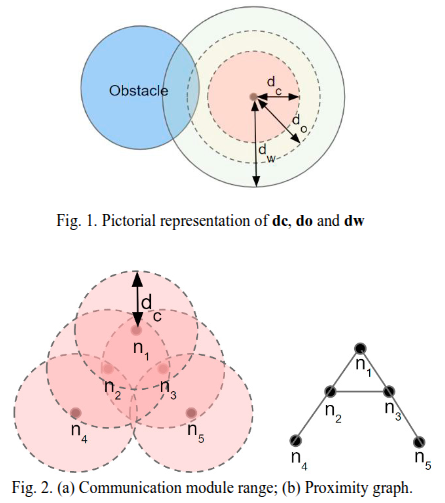
I developed a navigation controller utilizing consensus equations to manage waypoint navigation, collision avoidance, and formation control. This ensured that the drones could move as a cohesive unit without colliding, even when scaling up to 25 agents.
2. Optimization Algorithms
For the disaster relief scenario, the swarm needed to identify targets (simulated survivors/supplies) efficiently. I designed an optimized target-search algorithm based on the Particle Swarm Optimization (PSO) technique. This allowed the UAVs to:
- Communicate findings to neighbors.
- Converge on target clusters in minimum time.
- Ensure rapid response allocation.
3. Human Survivor Detection System
We collected a large dataset using RGB (day operation) and Thermal (night operations) cameras, labeled the data, and trained a YOLOv6-tiny architecture to detect human survivors in the search area.
4. System Integration
Along with my teammates, we built a robust ROS (Robot Operating System) pipeline. This acted as the backbone, connecting:
- Low-level flight control (ArduPilot/PX4).
- High-level swarm logic.
- Communication modules for inter-agent data sharing.
Leadership & Management
Transitioning from a technical contributor to the Team Lead, my responsibilities shifted towards project management and resource acquisition.
- Strategic Partnership: I led negotiations and signed a comprehensive MoU with Adani Defence and Aerospace, securing the critical funding needed to build 25 industrial-grade UAVs.
- Operations: Managed a timeline spanning over 18 months, coordinating between software, avionics, and airframe sub-teams.
- Resilience: The project involved over 100 hours of flight tests. We faced numerous crashes and hardware failures. Keeping the team motivated through these setbacks was as crucial as the engineering itself.


🏁 The Outcome
After months of rigorous testing and optimization, we deployed the full swarm of 25 UAVs in the final challenge. The system successfully took off, performed the optimal area search, identified targets, and returned to base, validating our consensus algorithms and hardware robustness in a real-world, high-pressure environment.
This project was a defining moment in my engineering journey, teaching me how to bridge the gap between theoretical research and practical, deployable systems.
References
2021
2020
- PCS’20
 A novel controller of multi-agent system navigation and obstacle avoidanceProcedia Computer Science, 2020
A novel controller of multi-agent system navigation and obstacle avoidanceProcedia Computer Science, 2020